Index
- Eclipse IDE and JTAG
- Unlock STM32F103 with JTAG
- Flash firmware using Bluetooth
- Serial Port Bluetooth
- Serial Port Plot
- SM32F103C8T6 use 128kbytes flash
- Observer
- Shane Colton documentation and firmware
- Firmware
- Part 1: Field-Oriented
- Part 2: Field-Oriented
- Sensorless Pneu Scooter - part 1
- Sensorless Pneu Scooter - part 2
- Sensorless Pneu Scooter - part 3
- Texas Instruments videos
- Chinese controllers code
- Chinese balance group reference design
- Kerry D. Wong -- A Self-Balancing Robot
- Self balance bicycle
- PID
- LQR
- PID and LQR, MATLAB
- Steve Brunton videos
Serial Port Bluetooth
Software Serial Port
• cutecom
First step : pair the device and provide the PIN
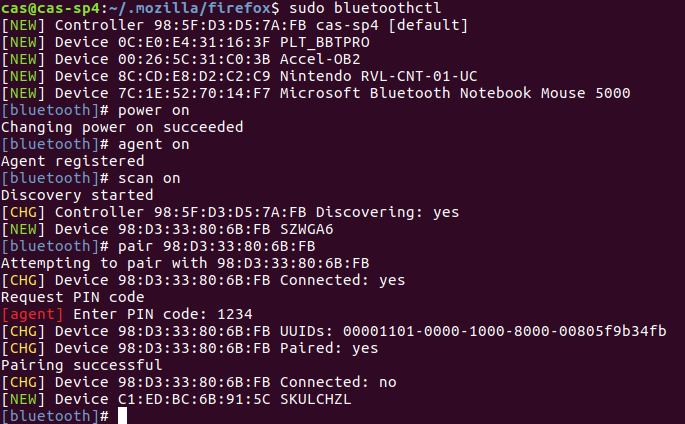
I tried to setup from GUI the pairing, but it wasn't working. Here is the command line way to proceed that worked for me. First, let us pair the device from command line. Run :
sudo bluetoothctl
Be sure that the bluetooth device is started :
# power on
We now start the agent that will "remember the pin" for rfcomm :
# agent on
Now we enable the scan mode to find our device and be able to pair it :
# scan on
After a few seconds the MAC of your device should appear. We will denote it as after. Then, you just need to pair the device like this :
# pair <MAC>
You will be asked to type a PIN, by default it's 1234 on my HC-05 device. You can note that it's possible that you device connect then disconnect with a message like that :
[CHG] Device 20:16:10:24:29:77 UUIDs: 00001101-0000-1000-8000-00805f9b34fb
[CHG] Device 20:16:10:24:29:77 ServicesResolved: yes
[CHG] Device 20:16:10:24:29:77 Paired: yes
Pairing successful
[CHG] Device 20:16:10:24:29:77 ServicesResolved: no
[CHG] Device 20:16:10:24:29:77 Connected: no
but it's not a problem. You do not need to connect, so you can now quit bluetoothctl by typing Ctrl + D.
Provide a usable file /def/rfcomm0
Firstly, be sure that you didn't run any rfcomm command before. Indeed, even if you close with Ctrl+C the program, it still run in background.
sudo killall rfcomm
Now, you can run
sudo rfcomm connect /dev/rfcomm0 98:D3:33:80:6B:FB 1 &
Note that if you try to write on the input of rfcom, nothing happened. You need to use another program.