Index
- Eclipse IDE and JTAG
- Unlock STM32F103 with JTAG
- Flash firmware using Bluetooth
- Serial Port Bluetooth
- Serial Port Plot
- SM32F103C8T6 use 128kbytes flash
- Observer
- Shane Colton documentation and firmware
- Firmware
- Part 1: Field-Oriented
- Part 2: Field-Oriented
- Sensorless Pneu Scooter - part 1
- Sensorless Pneu Scooter - part 2
- Sensorless Pneu Scooter - part 3
- Texas Instruments videos
- Chinese controllers code
- Chinese balance group reference design
- Kerry D. Wong -- A Self-Balancing Robot
- Self balance bicycle
- PID
- LQR
- PID and LQR, MATLAB
- Steve Brunton videos
MicroWorks 500W 30km/h motor
This motor is from MicroWorks (https://microworks.en.alibaba.com/) and is advertised as a 500W motor and 30km/h.
The wheel have a 14 inch diameter tire. The perimeter of the wheel is ~1.12 meters (measured with inflated tire and without anyone on top of the EUC).
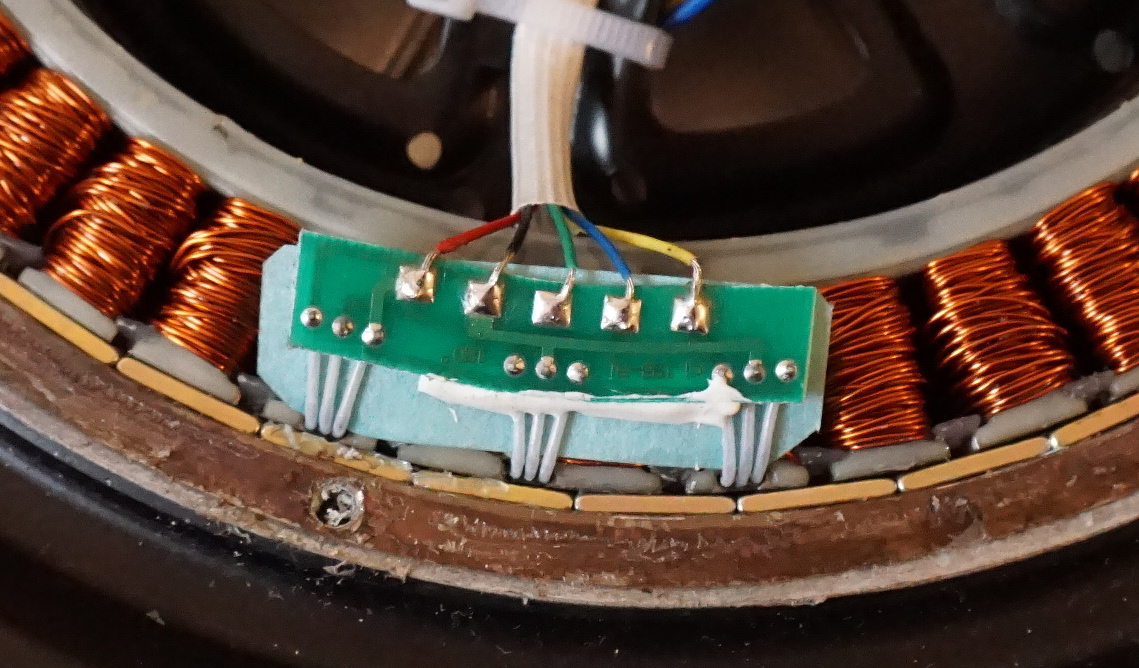
The generic EUC motor have 48 coils and 44 magnets. It also have 3 hall sensors. For each full rotation, each hall sensor signal will have a transition state of 22.7ms (1s/44 = 0.02272).
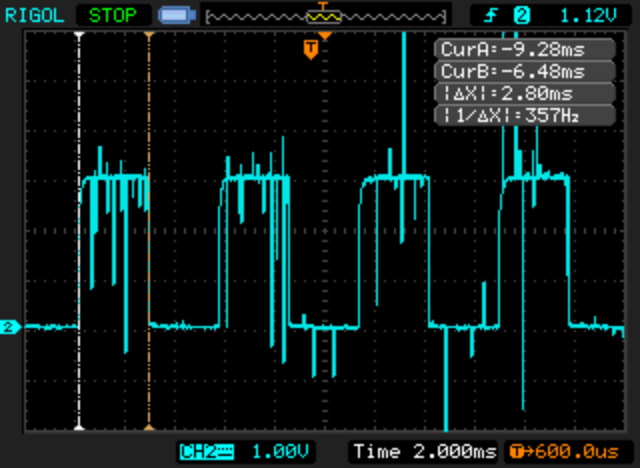
When this motor is controlled with the MicroWorks 30B4 controller board, each hall sensor signal have a period of 2.8ms. Since for each 1 rotation per second equals to 4.032km/h (1.12 * 60 * 60) and hall sensor signal is 22.72ms, at the max speed with all sensor signal of 2.8ms, the velocity is 8.11 times more (22.72/2.8) and so is 32.7km/h. This was measured with battery full and wheel on the air.
Pictures of the motor MicroWorks 500W 30km/h