Index
- Eclipse IDE and JTAG
- Unlock STM32F103 with JTAG
- Flash firmware using Bluetooth
- Serial Port Bluetooth
- Serial Port Plot
- SM32F103C8T6 use 128kbytes flash
- Observer
- Shane Colton documentation and firmware
- Firmware
- Part 1: Field-Oriented
- Part 2: Field-Oriented
- Sensorless Pneu Scooter - part 1
- Sensorless Pneu Scooter - part 2
- Sensorless Pneu Scooter - part 3
- Texas Instruments videos
- Chinese controllers code
- Chinese balance group reference design
- Kerry D. Wong -- A Self-Balancing Robot
- Self balance bicycle
- PID
- LQR
- PID and LQR, MATLAB
- Steve Brunton videos
The brilliant idea of slow rotating motors
https://www.aerodesign.de/peter/2001/LRK350/Paper_from%20_Wroclaw.html
The brilliant idea of slow rotating motors
essential extract from publication
THREE-PHASE LOW-SPEED PERMANENT MAGNET
SYNCHRONOUS MACHINES
P.Zielinski, K.Schoepp
Institute of Electrical Machine Systems
Technical University of Wroclaw
ul. Smoluchowskiego 19, 50-372 Wroclaw, Poland
1991
Abstract
There is a growing demand for low-speed electrical machines, because they can eliminate expensive, energy-consuming and noise-producing gear-boxes. Among the potential applications of the low-speed machines are motors in direct drive systems and generators in small wind- or hydro-power plants. The paper attempts to make contribution to that subject, presenting the construction principle of the novel 3-phase multipole synchronous machines. The new armature winding arrangement, used in the design, requires very small number of slots per pole per phase. That feature enables the design of the multipole low--speed machine of relatively small diameter. The laboratory tests results of the 14-pole machine model, equipped with such a winding are included.
List of symbols:
Bm - maximum no-load flux density
D - rotor diameter
f - frequency
n - speed of rotation
p - number of pole-pairs
q - numebr of slots per pole per phase
T - torque
tau - pole-pitch
Concept of 3-phase multipole synchronous machines
The speed of rotation of synchronous machines is closely related to the armature current frequency f, number of pole-pairs p, and thus indirectly to the rotor diameter D and the pole-pitch by formula
n=f/p (1) (see also Why does the Torquemax rotate so slowly and so forcefully )
Assuming constant frequency, it is evident from (1) that the only way to lower the speed of the machine is to increase its number of pole-pairs. That requires, however, increase of the rotor diameter or reduction of the pole-pitch or application of both these means. The choice depends upon specific design requirements which may impose some limitations.
Enlargement of the rotor diameter means enlargement of the overall radial dimension and increase of the rotor moment of inertia, which may be undesirable. On the other hand the pole-pitch reduction meets the feasibility limit, since the armature teeth become to narrow and the small slot width to depth ratio reduces a slot filling factor and increases slot leakage.
Additional, the short coil overhangs make almost unworkable a single-layer winding and complicate a double-layer construction. The recently developed permanent magnet materials of high inherent energy density allow to employ the new machine concepts.
One of them is the transversal-flux synchronous machine [1] in which the design limits for the electric and magnetic circuits are not as strong as they are for conventional machine structures, since both circuits are almost independent. The electric loading is also practically independent of the pole-pitch so the later can be made quite small. One of disadvantages of the transversall-flux configuration is its quite complicated structure, so its usage is justified only in case of very small speed machines. Transverse-flux machines are virtually single-phase module structures which can be combined to form 2-phase machines. The design of a 3-phase symmetrical machine would be rather complicated.
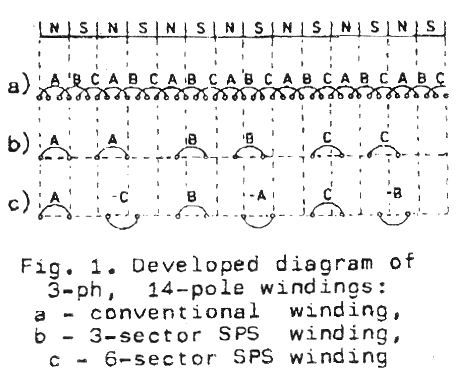
Authors present the novel concept of synchronous machines which allows considerable reduction of the pole-pitch by employing a 3-phase winding with separated phase-sectors (SPS) [2]. The idea of how this winding develops from the conventional one is shown in Fig. 1.
| click me | click me |
|---|---|
| Die LRK-fans recognize in line c) winding A and -A. This is our 180 degree out of phase winding, that we put on opposite slots. See also here |
Fig. 1a shows the conventional 3-phase, 14-pole winding with one slot per pole per phase. It consists of 21 coils, embedded in 42 slots.
Fig. 1b and lc show the new winding arrangement with separated phase-sectors (SPS).
The "phase-sector" is here understood as a part of the armature in which there are only coils belonging to the same phase-winding. Fig. lb shows the SPS winding composed of three phase-sectors (with two coils in each sector) and Fig. lc the winding of six single-coiled phase-sectors. Location of the coils in a given sector can be easily determined since it corresponds with coil distribution in the conventional winding (Fig. 1a). Despite the very small number of coils in each of SPS-windings, they retain features of being the electrically symmetrical 3-phase, 14-pole windings.
The 6-sector winding in Fig.1c proves better than the 3-sector one because each phase-winding is symmetrical with respect to the machine shaft. This geometric symmetry eliminates unbalanced radial forces which may occur between stator and rotor surfaces.
The brilliant idea of slow rotating motors
essential extract from publication
THREE-PHASE LOW-SPEED PERMANENT MAGNET
SYNCHRONOUS MACHINES
P.Zielinski, K.Schoepp
Institute of Electrical Machine Systems
Technical University of Wroclaw
ul. Smoluchowskiego 19, 50-372 Wroclaw, Poland
1991
Abstract
There is a growing demand for low-speed electrical machines, because they can eliminate expensive, energy-consuming and noise-producing gear-boxes. Among the potential applications of the low-speed machines are motors in direct drive systems and generators in small wind- or hydro-power plants. The paper attempts to make contribution to that subject, presenting the construction principle of the novel 3-phase multipole synchronous machines. The new armature winding arrangement, used in the design, requires very small number of slots per pole per phase. That feature enables the design of the multipole low--speed machine of relatively small diameter. The laboratory tests results of the 14-pole machine model, equipped with such a winding are included.
List of symbols:
Bm - maximum no-load flux density
D - rotor diameter
f - frequency
n - speed of rotation
p - number of pole-pairs
q - numebr of slots per pole per phase
T - torque
tau - pole-pitch
Concept of 3-phase multipole synchronous machines
The speed of rotation of synchronous machines is closely related to the armature current frequency f, number of pole-pairs p, and thus indirectly to the rotor diameter D and the pole-pitch by formula
n=f/p (1) (see also Why does the Torquemax rotate so slowly and so forcefully )
Assuming constant frequency, it is evident from (1) that the only way to lower the speed of the machine is to increase its number of pole-pairs. That requires, however, increase of the rotor diameter or reduction of the pole-pitch or application of both these means. The choice depends upon specific design requirements which may impose some limitations.
Enlargement of the rotor diameter means enlargement of the overall radial dimension and increase of the rotor moment of inertia, which may be undesirable. On the other hand the pole-pitch reduction meets the feasibility limit, since the armature teeth become to narrow and the small slot width to depth ratio reduces a slot filling factor and increases slot leakage.
Additional, the short coil overhangs make almost unworkable a single-layer winding and complicate a double-layer construction. The recently developed permanent magnet materials of high inherent energy density allow to employ the new machine concepts.
One of them is the transversal-flux synchronous machine [1] in which the design limits for the electric and magnetic circuits are not as strong as they are for conventional machine structures, since both circuits are almost independent. The electric loading is also practically independent of the pole-pitch so the later can be made quite small. One of disadvantages of the transversall-flux configuration is its quite complicated structure, so its usage is justified only in case of very small speed machines. Transverse-flux machines are virtually single-phase module structures which can be combined to form 2-phase machines. The design of a 3-phase symmetrical machine would be rather complicated.
Authors present the novel concept of synchronous machines which allows considerable reduction of the pole-pitch by employing a 3-phase winding with separated phase-sectors (SPS) [2]. The idea of how this winding develops from the conventional one is shown in Fig. 1.
Die LRK-fans recognize in line c) winding A and -A.
This is our 180 degree out of phase winding, that we put on opposite slots.
See also here
Fig. 1a shows the conventional 3-phase, 14-pole winding with one slot per pole per phase. It consists of 21 coils, embedded in 42 slots.
Fig. 1b and lc show the new winding arrangement with separated phase-sectors (SPS).
The "phase-sector" is here understood as a part of the armature in which there are only coils belonging to the same phase-winding. Fig. lb shows the SPS winding composed of three phase-sectors (with two coils in each sector) and Fig. lc the winding of six single-coiled phase-sectors. Location of the coils in a given sector can be easily determined since it corresponds with coil distribution in the conventional winding (Fig. 1a). Despite the very small number of coils in each of SPS-windings, they retain features of being the electrically symmetrical 3-phase, 14-pole windings.
The 6-sector winding in Fig.1c proves better than the 3-sector one because each phase-winding is symmetrical with respect to the machine shaft. This geometric symmetry eliminates unbalanced radial forces which may occur between stator and rotor surfaces.
It could be found that the 6-sector winding is feasible only for the number of pole-pairs given by formula
p = 6*k +/- 1 (2)
where k - number of coils in each sector: k = 1,2 ,3 , ...
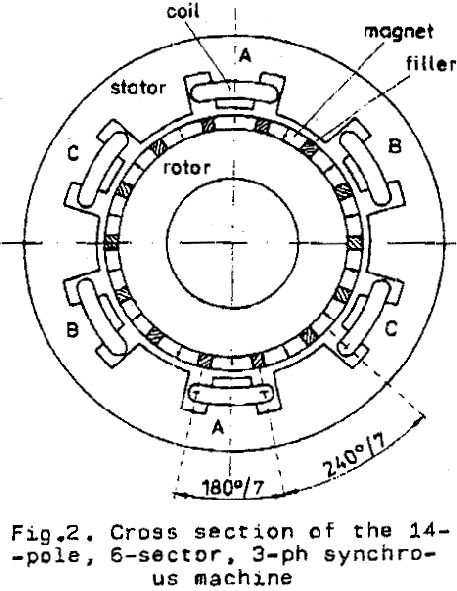
Fig.2 shows the cross section of the 14-pole 6-sector machine. The coil span is the same for all coils and is equal to the pole-pitch. However, the distance between two neighboring slots, belonging to the different phases is equal to 2*tau/3 or 4*tau/3 for (-) or (+) in equation (2) respectively.
PERFORMANCE OF 3-PHASE SYNCHRONOUS MACHINES WITH SPS-WINDINGS
The structure of electric and magnetic circuits of the 3-ph machine equipped with SPS-winding is such that each phase is practically decoupled. so it may be considered separately. Therefore, the 3-ph machine can be represented as three single-phase machines, supplied from different phases of 3-ph source and operating on the common shaft.
The next section of the publication contains a lot of equations, that are difficult to entry into html. I skip this section.
EXPERIMENTAL MACHINE MODEL
The 3-ph. 14-pole synchronous machine, model has been designed for experimental verification of the SPS-winding configuration.
The technical data of the model:
No-load e.m.f. (Eo) = 45 V
p = 7
n = 428.6 r.p.m. at 50 Hz
l = 26 mm, D = 67 mm
air-gap = 0.35 mm
The laminated cylindrical rotor has the neodymium magnets flat-mounted on its surface, producing no-load flux density of 0.7 T. The model has been tested as generator, operating on a resistive load as well as a motor.
The next section of the publication contains some diagrams of voltage and current and discussion of harmonic content. There is also an efficiency diagram (up to 72%), cos(phi) and power diagram. The copy that I own doesn't allow reasonable copy to be made.
CONCLUSIONS
Application of new permanent magnet materials of high energy enables construction of small-pitch multipole field systems, suitable for low-speed synchronous machines. Unfortunately, construction of the corresponding small pole-pitch armatures employing 3-ph conventional windings encounters a technological barrier, as the armature teeth are getting very thin end the winding overhangs become quite complicated due to short end-connections.
Application of the proposed SPS-winding enables machine designs of approximately three times smaller pole-pitches and rotor diameters than in machines with the conventional winding. The number of slots and coils is also reduced by the above ratio, which simplifies the construction considerably, and yet the machine retain their features of being the 3-phase symmetrical ones.
A change from the rotating to pulsating armature flux, being the consequence of application of SPS-winding, diminishes the torque produced, but this is partly made up for by possibility of employing higher electric loading. The SPS-machines seem to be the most suitable to fill the gap between the conventional and transversal-flux constructions ie for pole-pitches ranging from 5 to 2 cm. The test of the experimental machine model generally proved predicted features of the SPS-construction. Some further investigations should be carried to find the optimum design.
REFERENCES
1. Weh H., Hoffman H., Landrath J.: "New permanent magnet excited synchronous machine with high efficiency at low speeds" Proc. of the ICEM, 1988, pp.35-40.
2. Schoepp K., Zielinski P.: "Low-speed AC Machines" Report SPR nr 7/91 I-29, technical University of Warsaw 1991, pp. 1-27 (in Polish)
| click me | click me |
|---|---|
| It could be found that the 6-sector winding is feasible only for the number of pole-pairs given by formula p = 6*k +/- 1 (2) where k - number of coils in each sector: k = 1,2 ,3 , ... Fig.2 shows the cross section of the 14-pole 6-sector machine. The coil span is the same for all coils and is equal to the pole-pitch. However, the distance between two neighboring slots, belonging to the different phases is equal to 2*tau/3 or 4*tau/3 for (-) or (+) in equation (2) respectively. |
essential extract from publication
THREE-PHASE LOW-SPEED PERMANENT MAGNET
SYNCHRONOUS MACHINES
P.Zielinski, K.Schoepp
Institute of Electrical Machine Systems
Technical University of Wroclaw
ul. Smoluchowskiego 19, 50-372 Wroclaw, Poland
1991
Abstract
There is a growing demand for low-speed electrical machines, because they can eliminate expensive, energy-consuming and noise-producing gear-boxes. Among the potential applications of the low-speed machines are motors in direct drive systems and generators in small wind- or hydro-power plants. The paper attempts to make contribution to that subject, presenting the construction principle of the novel 3-phase multipole synchronous machines. The new armature winding arrangement, used in the design, requires very small number of slots per pole per phase. That feature enables the design of the multipole low--speed machine of relatively small diameter. The laboratory tests results of the 14-pole machine model, equipped with such a winding are included.
List of symbols:
Bm - maximum no-load flux density
D - rotor diameter
f - frequency
n - speed of rotation
p - number of pole-pairs
q - numebr of slots per pole per phase
T - torque
tau - pole-pitch
Concept of 3-phase multipole synchronous machines
The speed of rotation of synchronous machines is closely related to the armature current frequency f, number of pole-pairs p, and thus indirectly to the rotor diameter D and the pole-pitch by formula
n=f/p (1) (see also Why does the Torquemax rotate so slowly and so forcefully )
Assuming constant frequency, it is evident from (1) that the only way to lower the speed of the machine is to increase its number of pole-pairs. That requires, however, increase of the rotor diameter or reduction of the pole-pitch or application of both these means. The choice depends upon specific design requirements which may impose some limitations.
Enlargement of the rotor diameter means enlargement of the overall radial dimension and increase of the rotor moment of inertia, which may be undesirable. On the other hand the pole-pitch reduction meets the feasibility limit, since the armature teeth become to narrow and the small slot width to depth ratio reduces a slot filling factor and increases slot leakage.
Additional, the short coil overhangs make almost unworkable a single-layer winding and complicate a double-layer construction. The recently developed permanent magnet materials of high inherent energy density allow to employ the new machine concepts.
One of them is the transversal-flux synchronous machine [1] in which the design limits for the electric and magnetic circuits are not as strong as they are for conventional machine structures, since both circuits are almost independent. The electric loading is also practically independent of the pole-pitch so the later can be made quite small. One of disadvantages of the transversall-flux configuration is its quite complicated structure, so its usage is justified only in case of very small speed machines. Transverse-flux machines are virtually single-phase module structures which can be combined to form 2-phase machines. The design of a 3-phase symmetrical machine would be rather complicated.
Authors present the novel concept of synchronous machines which allows considerable reduction of the pole-pitch by employing a 3-phase winding with separated phase-sectors (SPS) [2]. The idea of how this winding develops from the conventional one is shown in Fig. 1.
Die LRK-fans recognize in line c) winding A and -A.
This is our 180 degree out of phase winding, that we put on opposite slots.
See also here
Fig. 1a shows the conventional 3-phase, 14-pole winding with one slot per pole per phase. It consists of 21 coils, embedded in 42 slots.
Fig. 1b and lc show the new winding arrangement with separated phase-sectors (SPS).
The "phase-sector" is here understood as a part of the armature in which there are only coils belonging to the same phase-winding. Fig. lb shows the SPS winding composed of three phase-sectors (with two coils in each sector) and Fig. lc the winding of six single-coiled phase-sectors. Location of the coils in a given sector can be easily determined since it corresponds with coil distribution in the conventional winding (Fig. 1a). Despite the very small number of coils in each of SPS-windings, they retain features of being the electrically symmetrical 3-phase, 14-pole windings.
The 6-sector winding in Fig.1c proves better than the 3-sector one because each phase-winding is symmetrical with respect to the machine shaft. This geometric symmetry eliminates unbalanced radial forces which may occur between stator and rotor surfaces.
It could be found that the 6-sector winding is feasible only for the number of pole-pairs given by formula
p = 6*k +/- 1 (2)
where k - number of coils in each sector: k = 1,2 ,3 , ...
Fig.2 shows the cross section of the 14-pole 6-sector machine. The coil span is the same for all coils and is equal to the pole-pitch. However, the distance between two neighboring slots, belonging to the different phases is equal to 2*tau/3 or 4*tau/3 for (-) or (+) in equation (2) respectively.
PERFORMANCE OF 3-PHASE SYNCHRONOUS MACHINES WITH SPS-WINDINGS
The structure of electric and magnetic circuits of the 3-ph machine equipped with SPS-winding is such that each phase is practically decoupled. so it may be considered separately. Therefore, the 3-ph machine can be represented as three single-phase machines, supplied from different phases of 3-ph source and operating on the common shaft.
The next section of the publication contains a lot of equations, that are difficult to entry into html. I skip this section.
EXPERIMENTAL MACHINE MODEL
The 3-ph. 14-pole synchronous machine, model has been designed for experimental verification of the SPS-winding configuration.
The technical data of the model:
No-load e.m.f. (Eo) = 45 V
p = 7
n = 428.6 r.p.m. at 50 Hz
l = 26 mm, D = 67 mm
air-gap = 0.35 mm
The laminated cylindrical rotor has the neodymium magnets flat-mounted on its surface, producing no-load flux density of 0.7 T. The model has been tested as generator, operating on a resistive load as well as a motor.
The next section of the publication contains some diagrams of voltage and current and discussion of harmonic content. There is also an efficiency diagram (up to 72%), cos(phi) and power diagram. The copy that I own doesn't allow reasonable copy to be made.
CONCLUSIONS
Application of new permanent magnet materials of high energy enables construction of small-pitch multipole field systems, suitable for low-speed synchronous machines. Unfortunately, construction of the corresponding small pole-pitch armatures employing 3-ph conventional windings encounters a technological barrier, as the armature teeth are getting very thin end the winding overhangs become quite complicated due to short end-connections.
Application of the proposed SPS-winding enables machine designs of approximately three times smaller pole-pitches and rotor diameters than in machines with the conventional winding. The number of slots and coils is also reduced by the above ratio, which simplifies the construction considerably, and yet the machine retain their features of being the 3-phase symmetrical ones.
A change from the rotating to pulsating armature flux, being the consequence of application of SPS-winding, diminishes the torque produced, but this is partly made up for by possibility of employing higher electric loading. The SPS-machines seem to be the most suitable to fill the gap between the conventional and transversal-flux constructions ie for pole-pitches ranging from 5 to 2 cm. The test of the experimental machine model generally proved predicted features of the SPS-construction. Some further investigations should be carried to find the optimum design.
REFERENCES
1. Weh H., Hoffman H., Landrath J.: "New permanent magnet excited synchronous machine with high efficiency at low speeds" Proc. of the ICEM, 1988, pp.35-40.
2. Schoepp K., Zielinski P.: "Low-speed AC Machines" Report SPR nr 7/91 I-29, technical University of Warsaw 1991, pp. 1-27 (in Polish)
PERFORMANCE OF 3-PHASE SYNCHRONOUS MACHINES WITH SPS-WINDINGS
The structure of electric and magnetic circuits of the 3-ph machine equipped with SPS-winding is such that each phase is practically decoupled. so it may be considered separately. Therefore, the 3-ph machine can be represented as three single-phase machines, supplied from different phases of 3-ph source and operating on the common shaft.
The next section of the publication contains a lot of equations, that are difficult to entry into html. I skip this section.
EXPERIMENTAL MACHINE MODEL
The 3-ph. 14-pole synchronous machine, model has been designed for experimental verification of the SPS-winding configuration.
The technical data of the model:
No-load e.m.f. (Eo) = 45 V
p = 7
n = 428.6 r.p.m. at 50 Hz
l = 26 mm, D = 67 mm
air-gap = 0.35 mm
The laminated cylindrical rotor has the neodymium magnets flat-mounted on its surface, producing no-load flux density of 0.7 T. The model has been tested as generator, operating on a resistive load as well as a motor.
The next section of the publication contains some diagrams of voltage and current and discussion of harmonic content. There is also an efficiency diagram (up to 72%), cos(phi) and power diagram. The copy that I own doesn't allow reasonable copy to be made.
CONCLUSIONS
Application of new permanent magnet materials of high energy enables construction of small-pitch multipole field systems, suitable for low-speed synchronous machines. Unfortunately, construction of the corresponding small pole-pitch armatures employing 3-ph conventional windings encounters a technological barrier, as the armature teeth are getting very thin end the winding overhangs become quite complicated due to short end-connections.
Application of the proposed SPS-winding enables machine designs of approximately three times smaller pole-pitches and rotor diameters than in machines with the conventional winding. The number of slots and coils is also reduced by the above ratio, which simplifies the construction considerably, and yet the machine retain their features of being the 3-phase symmetrical ones.
A change from the rotating to pulsating armature flux, being the consequence of application of SPS-winding, diminishes the torque produced, but this is partly made up for by possibility of employing higher electric loading. The SPS-machines seem to be the most suitable to fill the gap between the conventional and transversal-flux constructions ie for pole-pitches ranging from 5 to 2 cm. The test of the experimental machine model generally proved predicted features of the SPS-construction. Some further investigations should be carried to find the optimum design.
REFERENCES
1. Weh H., Hoffman H., Landrath J.: "New permanent magnet excited synchronous machine with high efficiency at low speeds" Proc. of the ICEM, 1988, pp.35-40.
2. Schoepp K., Zielinski P.: "Low-speed AC Machines" Report SPR nr 7/91 I-29, technical University of Warsaw 1991, pp. 1-27 (in Polish)